UbuntuでBluetooth接続のコントローラを使う
- 2021.09.26
- Python
Raspberry Pi(Ubuntu)で初めてBluetooth接続のコントローラを使ってみたので、その備忘録。
|
|
![[商品価格に関しましては、リンクが作成された時点と現時点で情報が変更されている場合がございます。]](https://hbb.afl.rakuten.co.jp/hgb/2198e6f9.64473d53.2198e6fa.0dd494bd/?me_id=1399997&item_id=10007509&pc=https%3A%2F%2Fthumbnail.image.rakuten.co.jp%2F%400_mall%2Feight1%2Fcabinet%2Fr_1630728773%2F4944314641753.jpg%3F_ex%3D300x300&s=300x300&t=picttext "[商品価格に関しましては、リンクが作成された時点と現時点で情報が変更されている場合がございます。]")

ペアリング
まずペアリングを行おうとしたのですが、なぜかBluetoothが使えませんでした。色々と調べてみて下記サイトに書いてあるコマンドを実行するとBluetoothが有効になり、ペアリングが出来るようになりました。

動作確認
ペアリングが終わったらちゃんと動くかどうかを確認します。そのためのツールがあるので下記の通りインストールします。
|
1 |
sudo apt install jstest-gtk |
起動すると軸数やボタン数が確認できます。
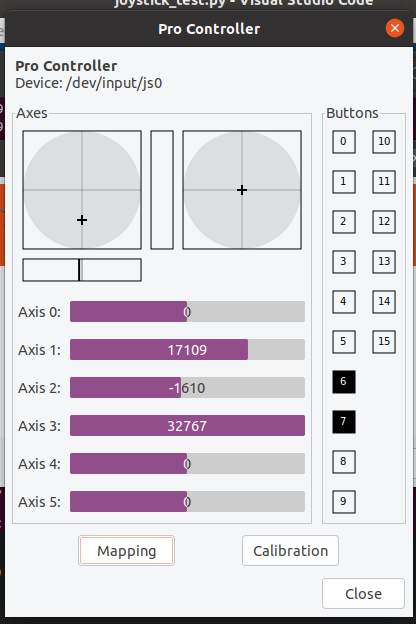
上記のオレンジの部分をダブルクリックすると、ジョイスティックやボタンの状態を確認できるようになります。ここで軸やボタンが反応しない場合、何かしらの不具合が起こっていることが分かります。
プログラム
プログラム上で各値を取得するためにpygameを使います。この時、sudo apt install python3-pipでインストールしようとすると、エラーでできませんでした。いくつか試してみて下記のコマンドでうまくいきました。
|
1 |
sudo apt-get install python3-pygame |
このpygameを使ったプログラムを作ってみました。スティックを傾けたりボタンを押したりすると値が取得できます。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 |
import pygame from pygame.locals import * import time def main(): pygame.init() joystick=pygame.joystick.Joystick(0) joystick.init() time.sleep(0.5) try: while True: for e in pygame.event.get(): if e.type==pygame.locals.JOYAXISMOTION: a=[] for i in range(4): a.append(joystick.get_axis(i)) print("JOYSTICK:" + str(a)) if e.type==pygame.locals.JOYBUTTONDOWN: print ("BUTTON:" + str(e.button)) time.sleep(0.1) except(KeyboardInterrupt): print("Close") if __name__=="__main__": main() |
とりあえず必要最小限のプログラムとなっています。ちなみに私が買ったコントローラはボタン2つにジャイロも搭載して合計6軸ですが、ジャイロの値の取得方法が分からなかったので、とりあえずスティック2つの合計4軸だけにしています。
-
前の記事

Raspberry PiのカメラモジュールをUbuntuで使う 2021.06.13
-
次の記事
AliExpressで買ったサーボモータ(LX-16A)を動かす 2022.04.29