fusionPCBで自作基板を作成
- 2022.11.23
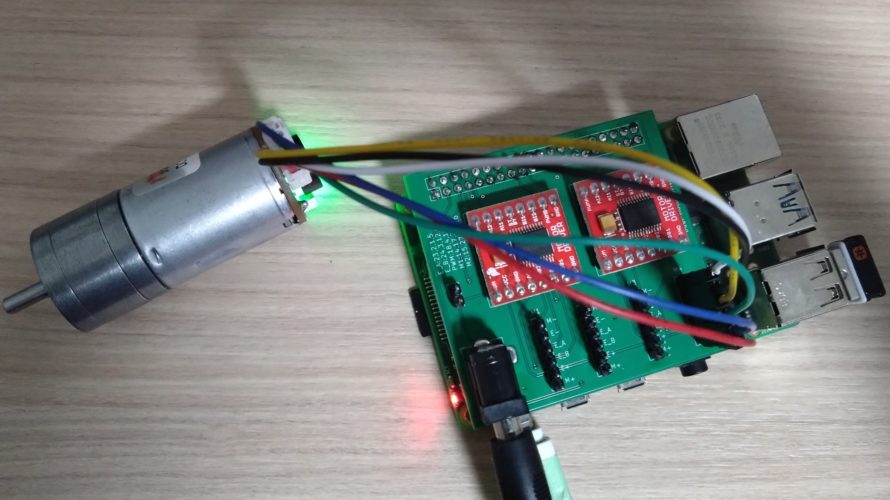
これまでArduinoやRaspberry Piでモータを使うときはブレッドボードを使っていましたが、複数同時になってくると配線が面倒な上、邪魔になってしまうので、思い切って基板を自作することにしました。 本記事では機械設計しか知らない完全初心者が基板を作成するにはどうすればいいのかを紹介します。(ソフトの操作方法などは載せてないので別で調べる必要があります) 回路・基板設計 まずは回路設計を行う […]
これまでArduinoやRaspberry Piでモータを使うときはブレッドボードを使っていましたが、複数同時になってくると配線が面倒な上、邪魔になってしまうので、思い切って基板を自作することにしました。 本記事では機械設計しか知らない完全初心者が基板を作成するにはどうすればいいのかを紹介します。(ソフトの操作方法などは載せてないので別で調べる必要があります) 回路・基板設計 まずは回路設計を行う […]
今までRaspberry PiのUbuntu20でVNCを使っていましたが、Ubntu22にすると今までのやり方では出来なくなってしまったので、設定した事項を残しておきます。 Ubuntu側設定 右上からSettings→Sharing→Remote Desktopからリモートデスクトップの設定を行います。今回は下記のように設定します。 更にこのウインドウの下でユーザ名やパスワードを設定しておきま […]
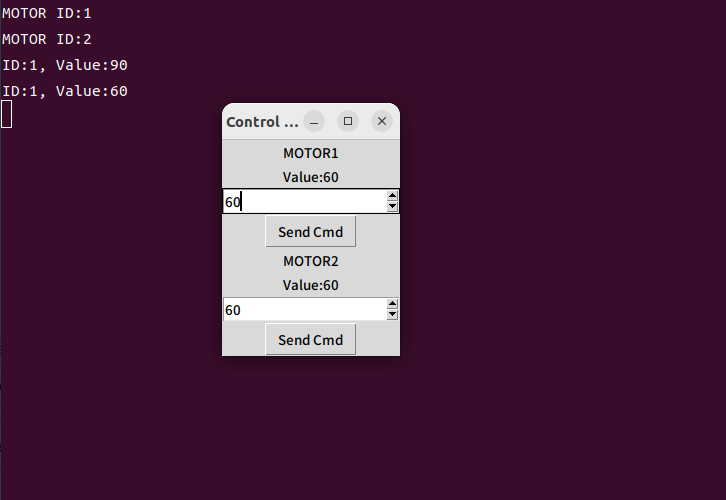
先日、AliExpressで買ったサーボモータを動かしてみましたが、今回はその操作パネルを作成しました。 プログラム [crayon-662cda71254de903032216/] モータを動作させる方法自体は以前の記事に記載しています。pythonのバージョンに注意が必要ですが、Ubuntu22.04なら問題ないはずです。 GUIはtkinterで作成しています。ボタンを押すとスピンボックスに […]
もはや昨年の話ですが、AliExpressでサーボモータを購入しました。まだロボットに組み込んで使ってはいませんが、とりあえず動作方法についてまとめます。 ライブラリ ライブラリがgithubで公開されています。pipでインストールできると書かれていますが、どうやってもエラーが解消できなかったため、諦めてまるごとコピーしました。 なお、こちらはpython3.10が必要なので、入って […]
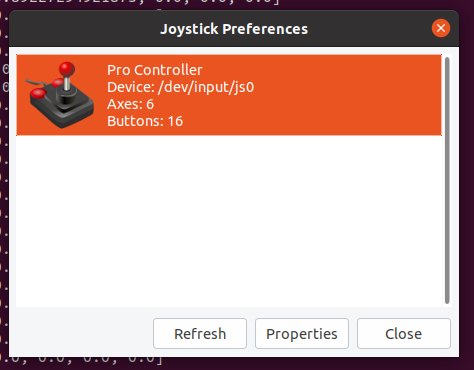
Raspberry Pi(Ubuntu)で初めてBluetooth接続のコントローラを使ってみたので、その備忘録。 EZdenK Switch コントローラー 背面ボタン搭載 最新システムに対応 6軸ジャイロセンサーTURBO連射機能 振動 Bluetooth スイッチ コン 価格:3869円(税込、送料無料) (2021/9/26時点) 楽天で購入 ペアリング まずペ […]
先日、Raspberry Pi用のカメラモジュールを購入しました。 公式のページだとRaspberry Pi OS上で動かす前提でしたが、/boot/firmware/config.txtに下記の2文を追加することでUbuntuでも使えました。 [crayon-662cda7125da9435761107/] gpu_memの値は何がいいのか分かりませんが、とりあえず256にしています。 この変更 […]
以前、PCとArduinoをつないでサーボモータを制御するコントロールパネルを作成しましたが、今回はRaspberry Piに近藤科学のサーボモータをつないだ時のコントロールパネルを作成してみました。 プログラム [crayon-662cda7125f50951806501/] Raspberry PiでKRSサーボモータを動かす方法は下記の記事に記載しています。そのプログラムを元に […]
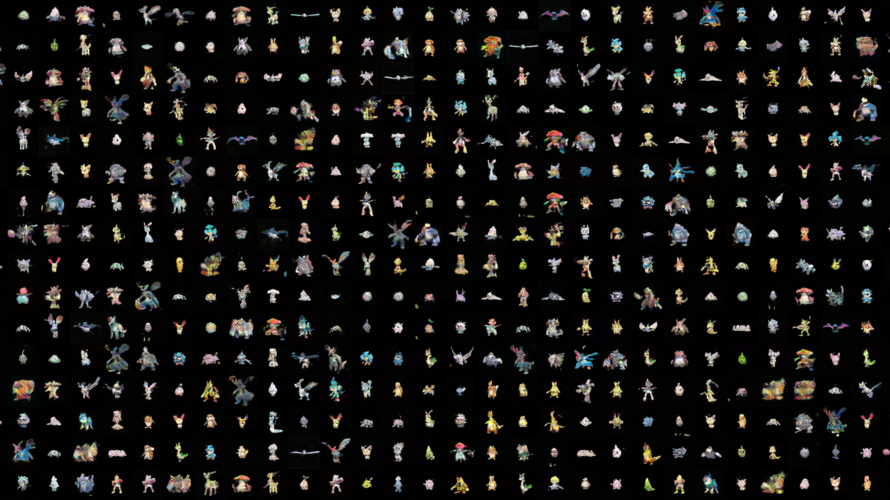
以前、アニメキャラをDCGANに学習させてみたことがあるのですが、ふと人間以外のキャラクタだとどうなるのかと思ったので、今度はstyleGANでポケモンの画像を学習させてみました。 使用するコードは下記で公開されているものです。学習済みのモデルも公開されており、非常にハイクオリティな人物や猫の画像がすぐに生成できます。 学習画像準備 今回は、まず学習用の画像を準備します。なお、ポケモンの画像はデー […]
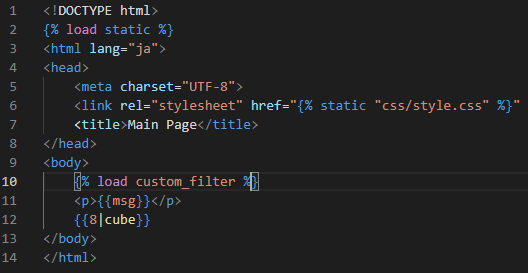
前回、前々回とDjangoに関する記事を載せましたが、カスタムフィルタでのJSONの受け渡しに少し苦戦したので、記録として残しておきたいと思います。 カスタムフィルタ カスタムフィルタ側はとりあえず受け取った値を含んだJSONデータを成形して返すというものになっています。データはmark_safeという関数を通していますが、これがないまま受け渡ししようとしてずっとうまくいきませんでした。Djang […]
前回の記事でDjangoアプリの最低限の設定を行いました。今回はもう少し踏み込んだ設定をします。なお、前回はアプリ名をpollsにしていましたが、今回はmainというアプリが設定済みという前提で進めています。 HTML まずhtmlを使用する準備をします。htmlファイルはアプリフォルダの中にtemplateフォルダを作り更にその中にアプリ名のフォルダを作成します。templateフォルダの中のフ […]