Djangoアプリを作る (初期設定)

- 2021.01.10
副業に向けた勉強としてDjangoのアプリを作ろうとししています。設定は基本的にサイトを見れば分かりますが、初期設定がそれなりに面倒だったので、自分で使うためにまとめておきます。 インストール Pythonはすでにインストールされているものとして、下記のコマンドでDjangoをインストールします。 [crayon-66218c5f945f5156338529/] プロジェクト作成 まずプロジェクト […]
副業に向けた勉強としてDjangoのアプリを作ろうとししています。設定は基本的にサイトを見れば分かりますが、初期設定がそれなりに面倒だったので、自分で使うためにまとめておきます。 インストール Pythonはすでにインストールされているものとして、下記のコマンドでDjangoをインストールします。 [crayon-66218c5f945f5156338529/] プロジェクト作成 まずプロジェクト […]
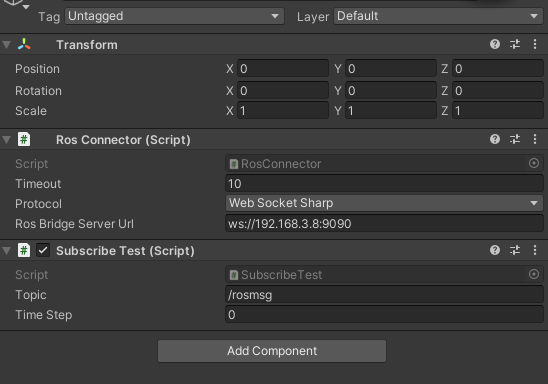
以前の記事でソケット通信でUnityからRaspberry Piにデータを送信できるようになりましたが、ROSを使うと非常に簡単に接続できたので備忘録として残しておきます。 セットアップ Raspberry PiにはROSがインストールされているとして、Unity(Windows)側の準備を行います。UnityでROSを使用するにはROS#というライブラリを使います。具体的なセットアップの方法は下 […]
Pythonのスレッドを止めたいとき、Ctrl+cでは止まらず、少し工夫する必要があったので備忘録として残します。 プログラム ループを同時に回したい場合に、while文にbool型のフラグを使用して、メインのループでCtrl+cを検出した時に、そのフラグをFalseにしています。これでスレッドがまとめて終了します。 [crayon-66218c5f94c49116104147/]
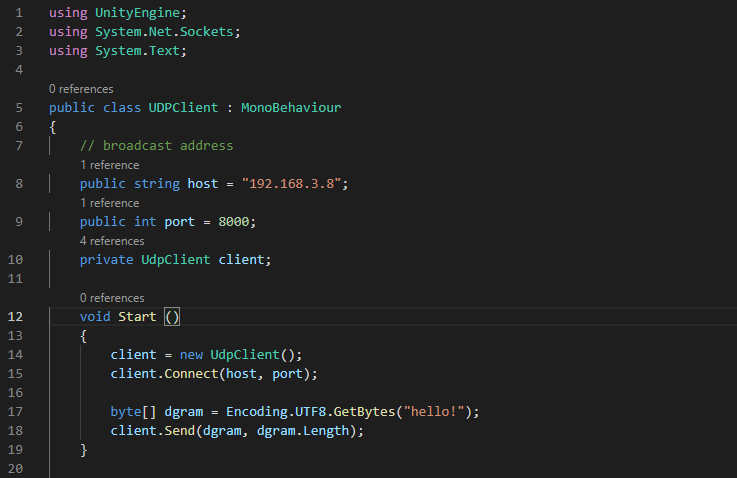
UnityからRaspberry Piへのデータ送信のプログラムです。Unity側はC#、Raspberry Pi側はPythonです。 Unity (クライアント) Unity側は送信なので、サーバのIPアドレスを指定します。同じPC内なら127.0.0.1を指定すればいけます。 [crayon-66218c5f94f27229193052/] Raspberry Pi (サーバ) […]
以前、プリメイドAIを分解してサーボモータを入手しましたが、今回Raspberry Piで動かしてみたので手順をメモしておきます。 必要品 KRSサーボモータ Raspberry Pi Dual USBアダプターHS USBアダプタはモータのIDを取得・変更したりするのに使用します。デイジーチェーンで繋ぐ場合は重複しないように設定が必要です。 設定 モータのIDの取得と変更は下記のソフトウェアで行 […]
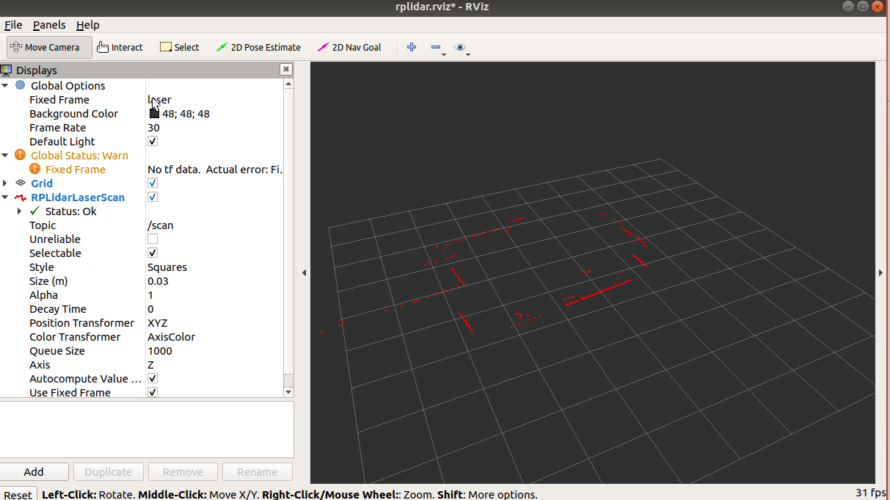
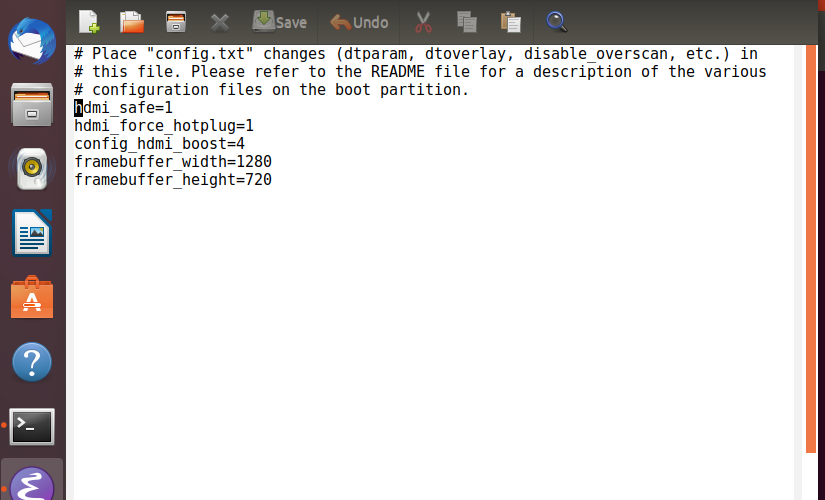
レーザスキャナを購入したので、Raspberry Piで使ってみました。 OSインストール 普段はRaspberry Pi OSを使っているのですが、ROSや関連のパッケージを使用する関係でUbuntuを使うことにしました。また、ROS noeticではなく1つ前のmelodicを使うためにUbuntu 18.04を選択しました。 Ubuntu ServerがRaspberry Piに対応している […]
これまでRaspberry PiにはRaspbian(Raspberry Pi OS)を入れていたのですが、ROSや関連のパッケージを使う関係でUbuntuに切り替えました。その時にVNCの設定も行ったのですが、少しハマった点があったのでメモとして残しておきます。 基本設定 基本的な設定に関しては、下記のページを参考にしました。 上記記事の内容でWindowsから接続自体はできました。 問題 設定 […]
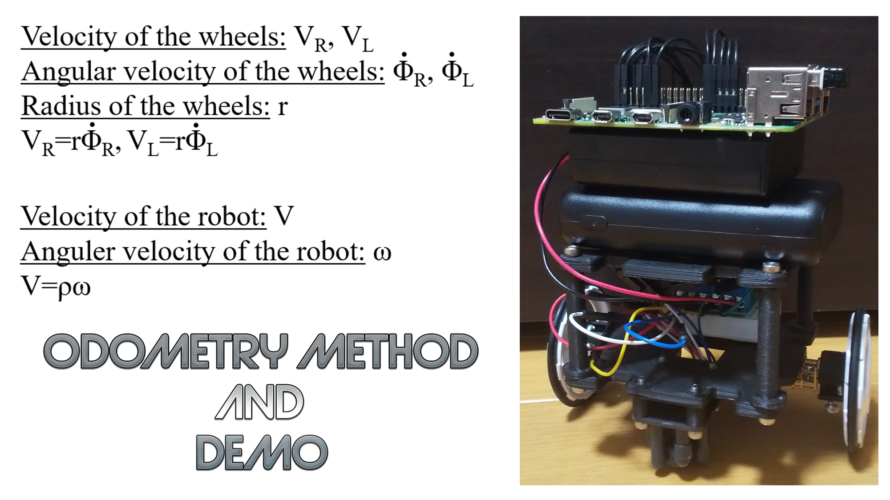
先日、Amazonで買ったエンコーダ付きのモータについて記事にしましたが、これを使ってオドメトリを試してみました。 オドメトリ法 オドメトリのアルゴリズムについて、ブログに書こうと思ったのですが、数式だけでなく画像も用意する必要があり、折角なので動画にしました。 考え方や数式はとても単純なものです。 プログラム ロボット全体のプログラムを載せると長くなるので、オドメトリクラスを載せておきます。 [ […]
先日購入したM5StickC用のジョイスティックモジュールをロボットのコントローラにすべく、プログラムを用意しました。 送信側 送信側はジョイスティックの入力を取得するプログラムと、Wifiで通信するプログラムを合体したものとなります。2つのプログラムについては、下記サイトで紹介されていたものを使用しました。 プログラム [crayon-66218c5f9566a657399605/] プログラム […]
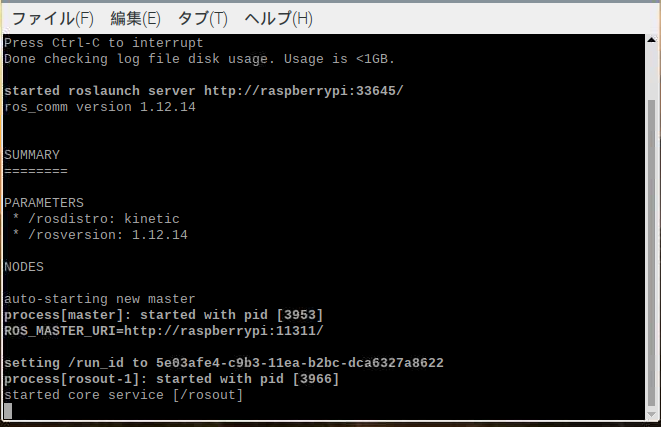
初めてRaspberry PiにROSをインストールしましたが、色々とハマった点があったので、解決策をまとめておきます。 インストール手順 インストールの手順自体はROSの公式HPにRaspberry Pi用のページが公開されています。 英語を読むのが面倒な方は下記のページでも手順が紹介されています。 エラー1 レポジトリと公開鍵の登録の後にapt-get updateがありますが、これを実行する […]