車輪付き4足歩行ロボット制作
- 2020.06.22
- 3Dプリンタ Raspberry Pi
最近、取り掛かっていた車輪付きの4足歩行ロボットですが、とりあえず歩くようになったので、自分用の備忘録も兼ねて使ったパーツなどをまとめておきます。
使ったパーツはこんな感じです。
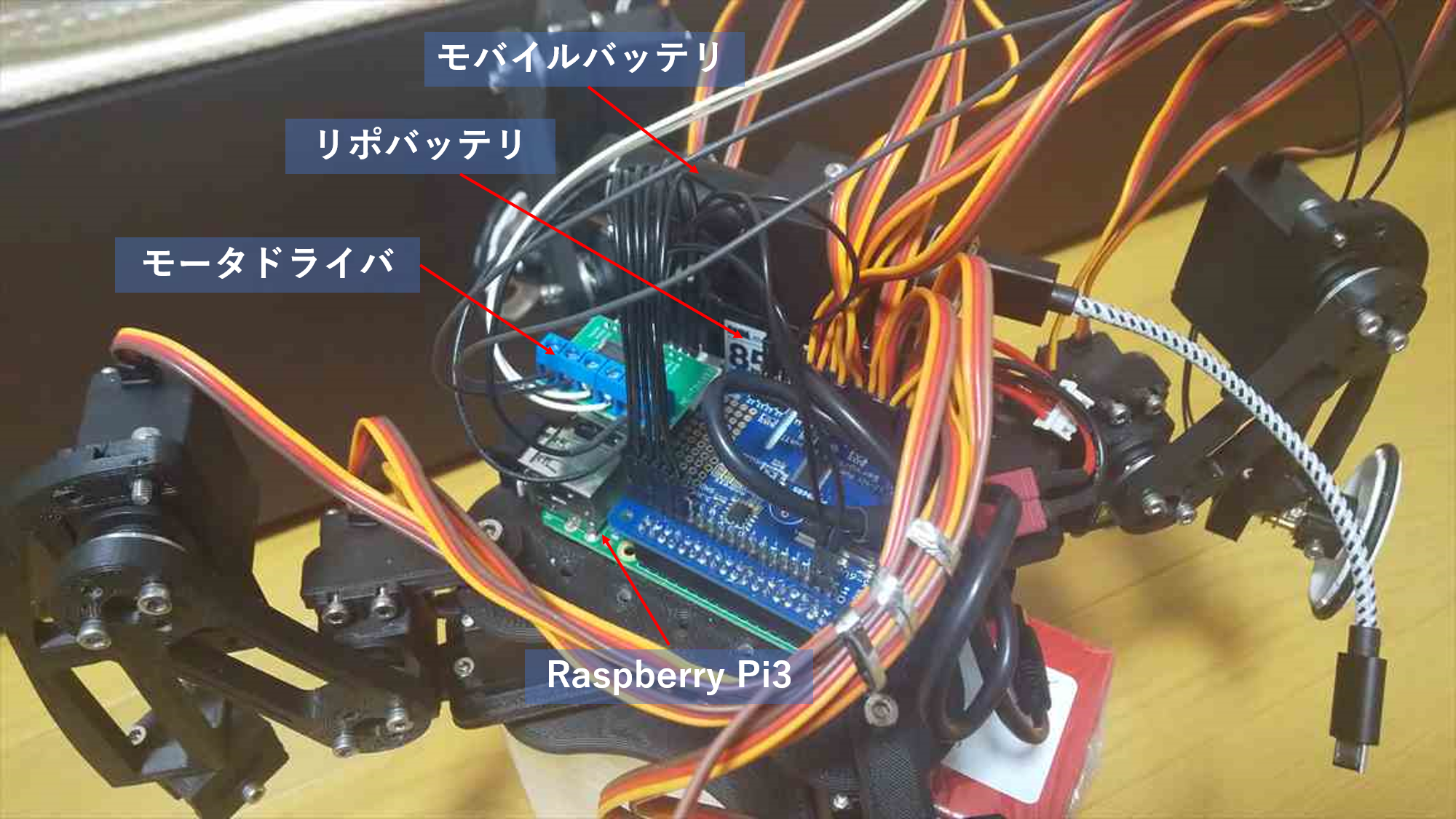
・Raspberry Pi3
・サーボ拡張ボード
・サーボモータ (MG996)
・DCモータ
・モータドライバ
・モバイルバッテリ
・リポバッテリ
ちなみにモータドライバについては、以前、使い方の記事を上げています。
なおリポバッテリに関しては、プリメイドAIのものを使いました。また、足やボディは3Dプリンタで作りました。
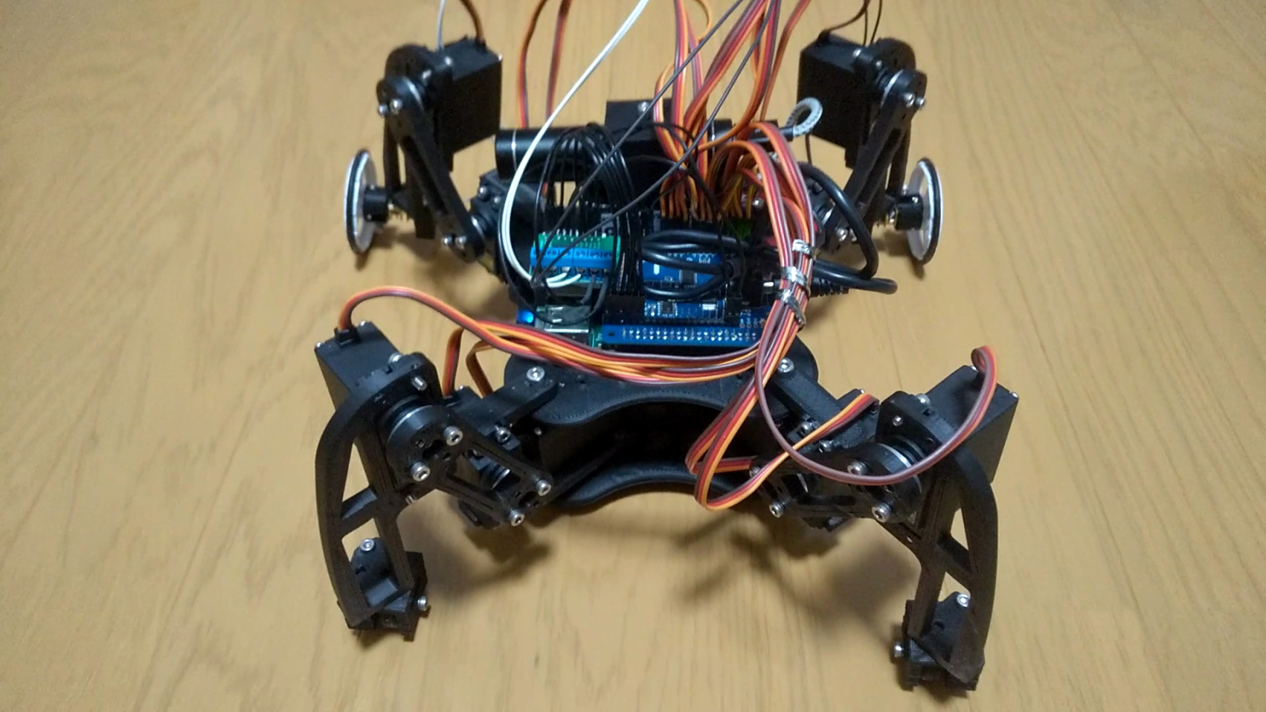
まず足回りですが、前の2本は3Dプリンタで自作したタイヤをつけて、後ろの2本にDCモータと市販のタイヤをつけています。

なんで後ろのタイヤも自作しなかったのかというと、以前オムニホイールを作ったことがあるのですが、この時フローリングでかなり滑っていたので、今回は諦めてゴムのタイヤを買いました。今思えばホイールの部分は自作しても良かったんですが、今回はアダプタを作ってホイールとモータを接続しています。
3Dプリンタで作ったオムニホイール。 #RaspberryPi pic.twitter.com/vjB5T4iaWl
— Ken@エンジニア投資家 (@Ken_okinawan) May 1, 2020
制御部分に関しては、バッテリ含めてロボットの上部にまとめて置いてありますが、Raspberry Piで行っています。勿論Arduinoでも動かせますが、VNCでデスクトップPCから簡単にコードを直しながら動きを試せるので、ラズパイだととても楽です。バッテリについては、モータ用のリポバッテリを分岐してラズパイ側に供給することも出来るとは思いますが、今回は小さめのモバイルバッテリを使っています。ちなみにモバイルバッテリを固定しているホルダも3Dプリンタの自作品です。
全体像はこんな感じです。自分で言うのも変ですが、割とかっこいいと思っています。
動きに関してはYouTubeに動画を上げています。車輪で走る際はいいですが、実は足で歩行しようとすると、まっすぐ歩けず少しずつ横にずれてしまいます。多分角度を調整すれば直進できるようになると思いますが、そこまではやっていません。
屈伸しながら前進。特に意味はない。 pic.twitter.com/f4EVlaCY1c
— Ken@エンジニア投資家 (@Ken_okinawan) June 23, 2020
一旦はこれで完成ですが、まだカメラを付けたり改造する余地はあるので、時間ができたらいじってみようと思います。
-
前の記事

Tkinter (Python)でサーボモータの操作パネルを作る V2 2020.06.14
-
次の記事

WordPressで下書きをプレビューすると404になる 2020.06.28