OTTO (二足歩行ロボット)を作る

オープンソースロボットのOTTOを作ってみました。
3Dパーツのモデルは下記にあります。
https://wikifactory.com/+OttoDIY/otto-diy/files/3Dprint
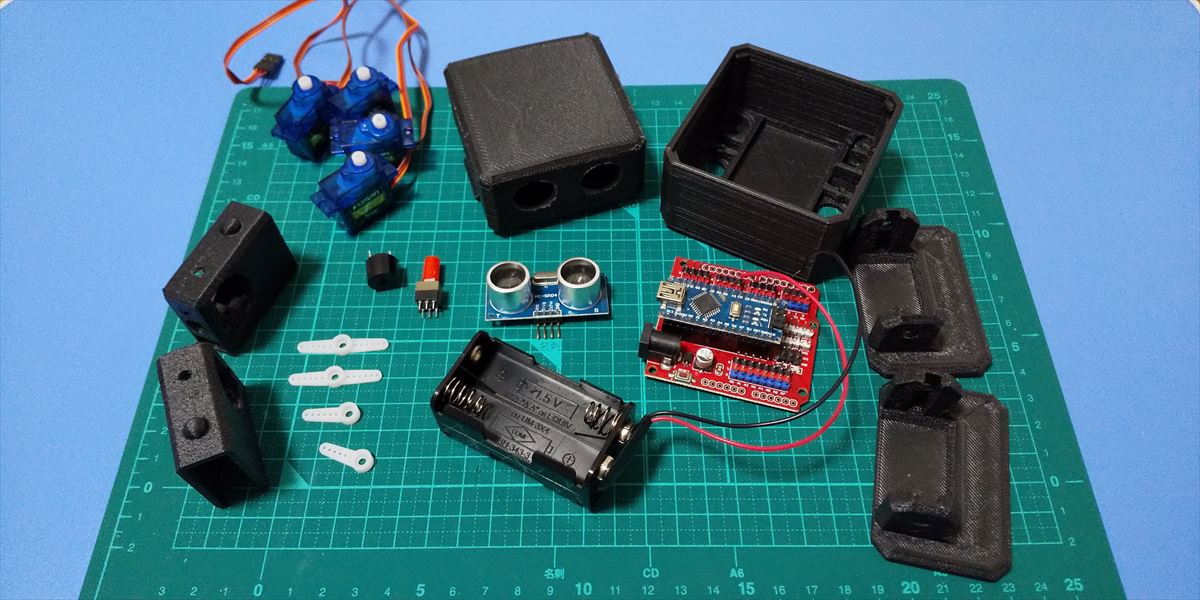
必要な部品はモータやArduinoなど下記の通りです。
- SG90 (サーボモータ)
- Arduino Nano
- Arduino Nano 拡張シールド
- [HC-SR04](http://akizukidenshi.com/catalog/g/gM-11009/) (超音波センサ)
- [ブザー](http://akizukidenshi.com/catalog/g/gP-09800/)
- 電池ボックス 単3電池 4本
- [スイッチ](http://akizukidenshi.com/catalog/g/gP-08788/)
組み立て方は下記にマニュアルがあります。
https://wikifactory.com/+OttoDIY/otto-diy/file/Instruction%20manual/OttoDIY_Manual_V9.pdf
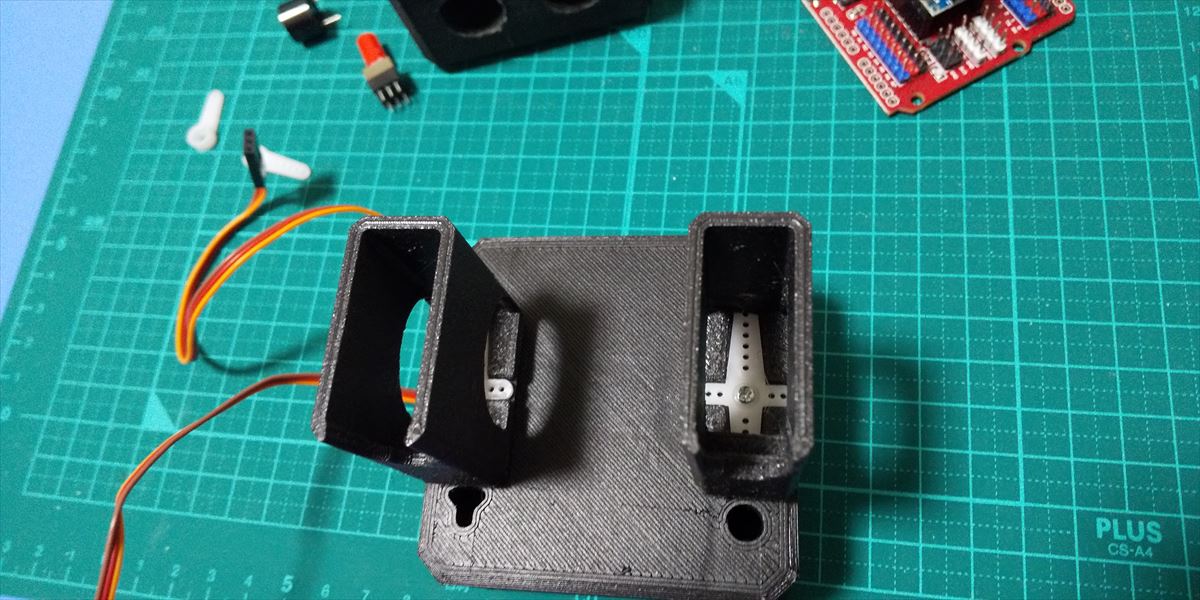
ボディにモーター2個を固定します。

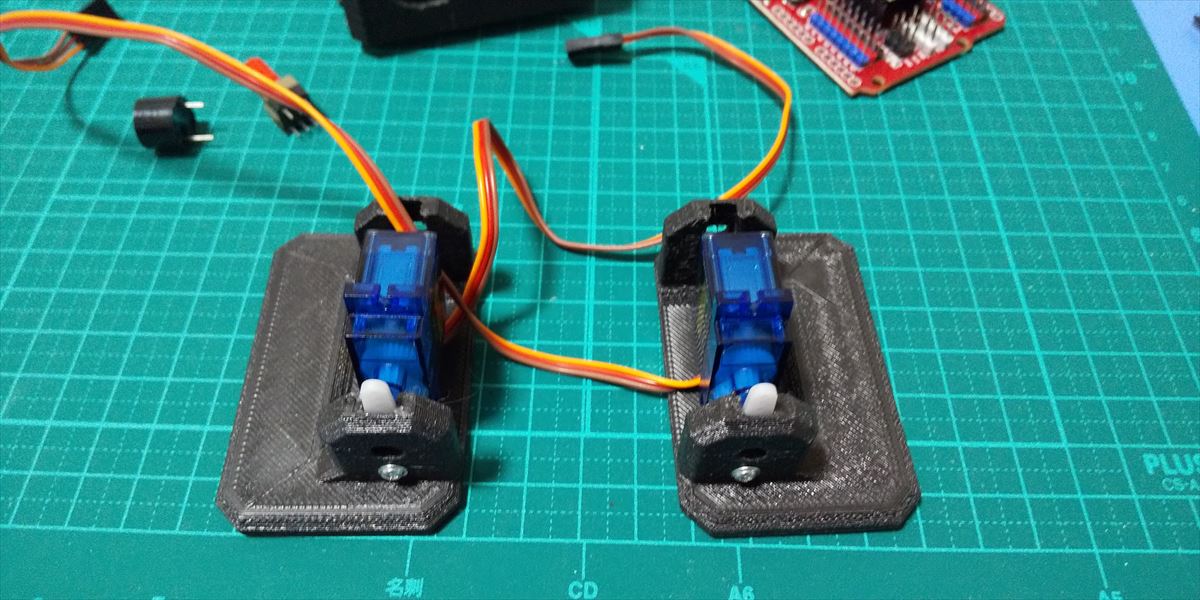
脚を付けます。
足首にモータを取り付けて脚に接続します。

電池ボックスとスイッチをArduino Nanoを接続します。
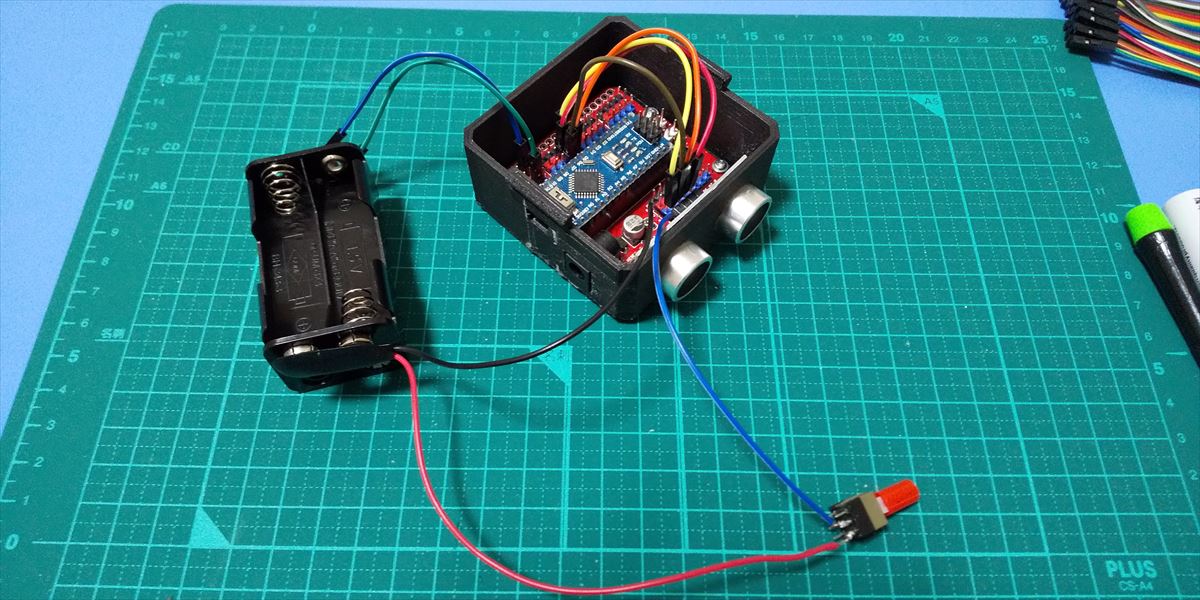
モータやブザーをArduino Nanoを接続します。
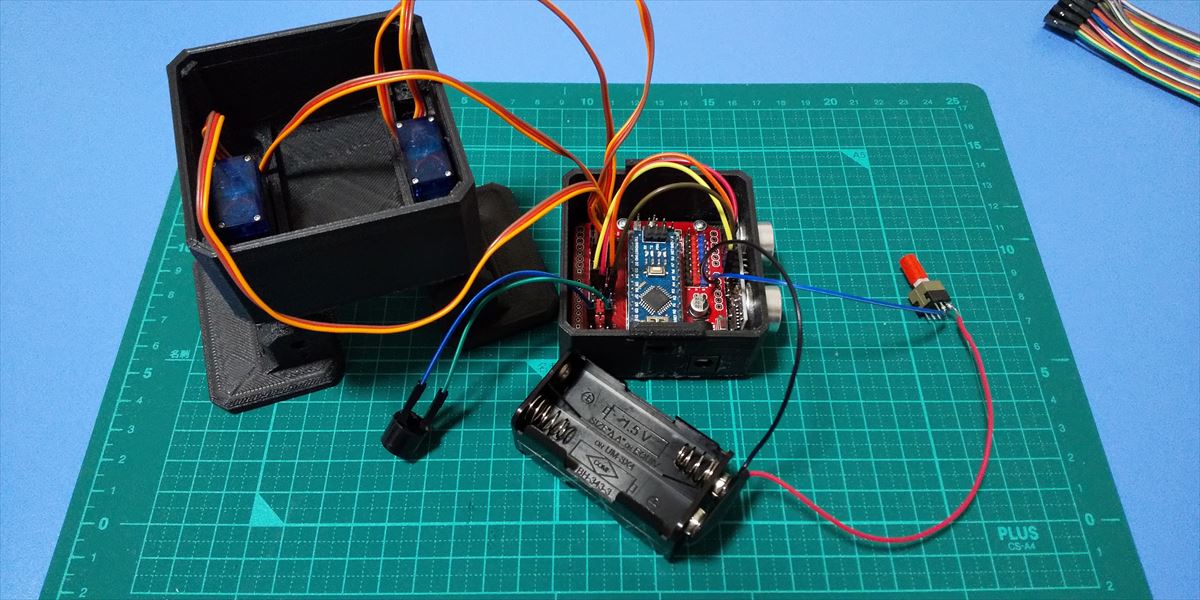
ボディに電池ボックスやブザーを取り付けます。
ちなみにブザーがボディの穴と合ってなかったので周りにテープを巻いています。
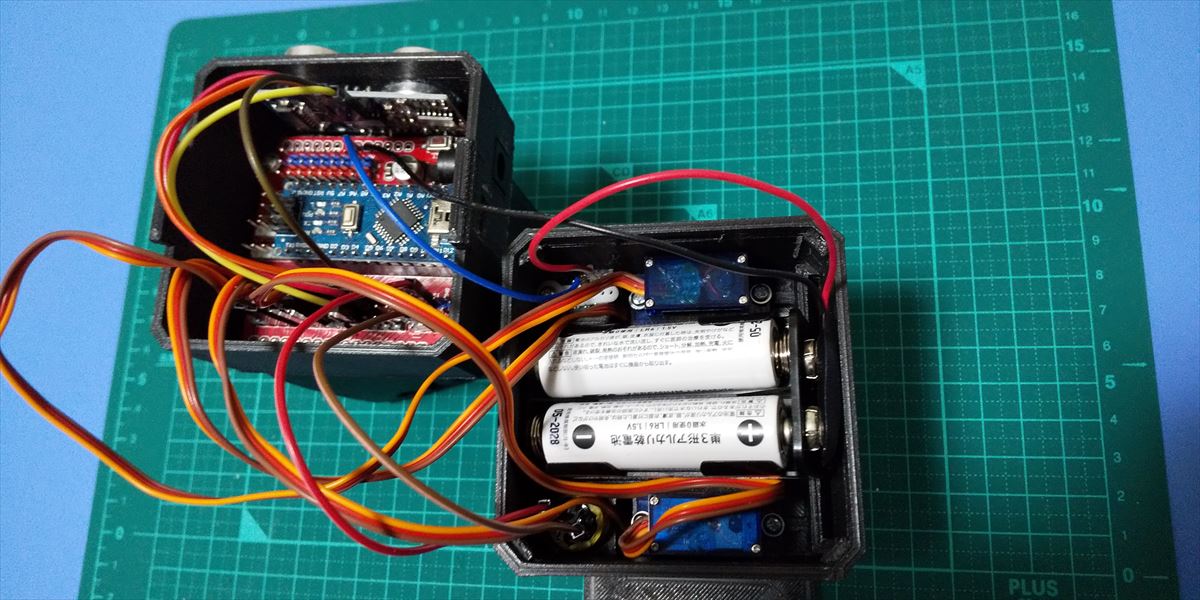
ボディと頭をくっつけて完成。
下記サイトのLibrariesのzipを解凍して、中身をArduino/librariesにコピーします。
https://wikifactory.com/+OttoDIY/otto-diy/files
適当なサンプルコードを保存してArduinoに書き込みます。
https://wikifactory.com/+OttoDIY/otto-diy/files/Code
かなり端折りましたが公式のマニュアルを見れば
Arduinoの接続先なども全部書いてあるので問題ないと思います。
-
前の記事

KerasでU-Netを実装してみる 2019.09.23
-
次の記事

M5StickCに為替レートを表示させる 2019.11.18